
VisualSFM三维重建软件 (支持32/64)
- v0.5.24
- 图形图像
 安全
安全
-
更新时间2017-03-20
-
大小2.4M
-
语言中文
0
《VisualSFM中文版》是一款信息组建类软件,支持三维重建,并且支持Windows32/64系统,可以直接进行你的图形操作,将2D图形进行再次编辑,支持多种软件格式,可以直接打开编辑,普通图形图像即可进行修改。
VisualSFM是一款十分强大的SFM三维重建软件,使用方法非常简单,完全傻瓜化操作。一个使用运动恢复结构(SFM)来进行3D场景重建的GUI程序。喜欢的朋友赶紧来下载体验吧!
可以帮助您使用SFM进行三维重建,利用并行计算的高效视觉三维场景重建程序,利用多核并行特征检测,特征匹配调整,速度非常快。
这个重建系统集合了很多高效的并行处理程序例如: SIFT on GPU(SiftGPU),Multicore Bundle Adjustment, andTowards Linear-time Incremental Structure from Motion.
这个VisualSFM系统运行效率非常高。
1.找出各张图片中的特征点,进行两两匹配;
要求能够精确识别物体的局部特征,并且进行快速准确的匹配。现常用的算法是由DacidLowe提出的SIFT方法。
2.根据匹配结果,利用射影定理计算得到相机位置等场景信息;
此步又称运动恢复结构(StructurefromMotion),或稀疏重建(SparseReconstruction)。结果的衡量标准注意是准确性,现常用是基于Lecenberg-Marquardt算法的Bundler。
3.运用场景信息与原始照片,得到照片中物体的3D点云;
此步又称密集重建(DenseReconstruction)。运用多视立体重建(Multi-viewStereoReconstruction),得到3D点云。点云质量受到处理图像精度的执行效率、重建精度和完整性影响,目前最好的算法是PMVS。
4.根据3D点云构建3D模型;
将点连成面,才可在一般三维建模软件中使用。现常用的是泊松表面重建算法(PossionSurfaceReconstruction)。
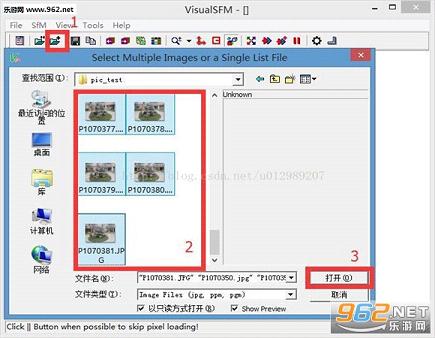
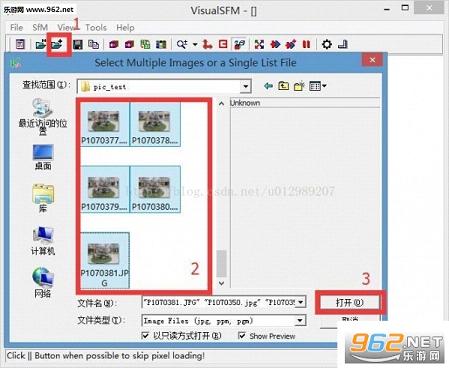
1.读取所需的照片;
点击“openMultipleImages”按钮,选择所需的图片(运用shift选取),再点击“open”,如下图所示。
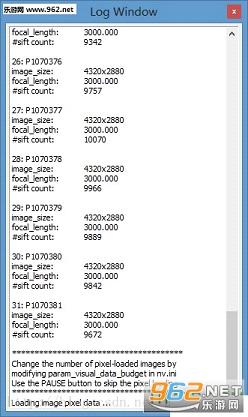
2.在TaskViewerwindow中可以看到处理的步骤及进度,如下图。
3.匹配照片之间的特征点;
点击“ComputeMissingMatches”,如下图。

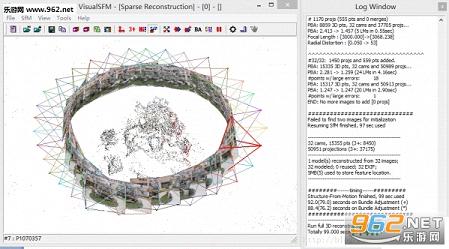
3.进行稀疏重建;
点击“Compute3DReconstruction”,如下图。

结果如下图:
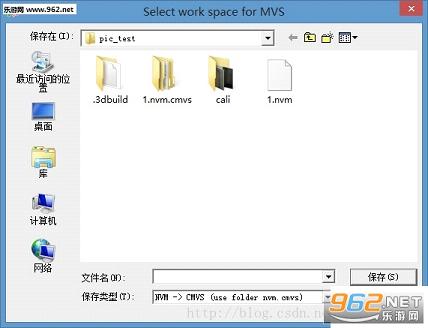
4.进行密集重建;
点击“RunDenseReconstruction”,如下图。

选择一个文件放置将要创建的模型,如下图
 微信抢红包软件
微信抢红包软件







玩家留言